glusterfs fuse简单介绍
xlator是glusterfs核心的概念,每个xlator对用一系列函数处理对应的文件操作,glusterfs/glusterfsd/glusterd的三个二进制的入口都是相同的(glusterfs/src/glusterfsd.c),但是在不同模块的逻辑上处理会加载不同的xlator来完成对应模块功能的操作。glusterfs客户端实现是基于fuse实现了自己的API。如下是glusterfs客户单核心函数调用链(glusterfs/src/glusterfsd.c)fuse 请求转发流程
1.main
- glusterfs入口函数
2.create_fuse_mount
- 设置mount/fuse xlator,调用xlator_set_type初始化这个mount/fuse的模块(实际调用mount/fuse中的xlator的init方法),这个也是后面我们着重需要讲清楚的模块
3.glusterfs_volumes_init
- 根据挂载时候的提供的节点IP,初始化glusterfs客户端需要的信息,比如服务端brick的元数据局,客户端需要加载的哪些xlators
4.glusterfs_mgmt_init
- 依据挂载(mount)时候提供的IP,和节点所在glusterd通信获取服务端的brick信息以及需要xlators
5.glusterfs_process_volfp
依据获取到的服务端提供的元数据,调用xlator_init初始化,整个客户端glustefs初始化完成,glusterfs 第一个访问的是mount/fuse xlator(这个xlator的配置信息不需要从glusterd请求获取) ,最后访问的是protocol/client的xlator
1 | /* client.so 对应的protocol/client 的xlator */ |
glusterfs_graph_activate
ctx->master在初始化时候已经把mount/fuse的xlator赋值给master了,然后在xlator graph激活时候,如果master不为空就执行xlator_notify函数,第一个参数就是mount/fuse的xlator的结构体指针
1
2
3
4
5
6
7
8glusterfs_graph_activate(glusterfs_graph_t *graph, glusterfs_ctx_t *ctx)
{
//fuse-bridge.c:notify在这里调用
if (ctx->master) {
ret = xlator_notify(ctx->master, GF_EVENT_GRAPH_NEW, graph)
((xlator_t *)ctx->master)->next = graph->top;
}
}
xlator_notify
- xlator_notify函数主要是调用mount/fuse这个xlator的notify函数多个线程读取/dev/fuse中数据
1
2
3
4
5xlator_notify(xlator_t *xl, int event, void *data, ...)
{
//调用mount/fuse xlator中的notify函数
xl->notify(xl, event, data);
}
notify
该函数是mount/fuse中的notify函数
1
2
3
4
5
6
7//mount/fuse中notify的函数
notify(xlator_t *this, int32_t event, void *data, ...)
{
//fork子进程在多线程中执行fuse_thread_proc
for (i = 0; i < private->reader_thread_count; i++) {
ret = gf_thread_create(&private->fuse_thread[i], NULL,fuse_thread_proc, this, "fuseproc");
}
fuse_thread_proc
- 读取/dev/fuse中的数据,转发给对应的fuse_xxx的函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14//启动线程轮训读取数据,在转发给对应的fuse_xxx函数
fuse_thread_proc(void *data)
{
xlator_t *this = NULL;
fuse_private_t *priv = NULL;
this = data;
priv = this->private;
THIS = this;
//在xlator/mount/fuse源代码模块中init函数中已经把priv->fd设置为/dev/fuse的文件描述符
res = sys_readv(priv->fd, iov_in, 2);
gf_async(&fasync->async, this, fuse_dispatch);
}
fuse_dispatch
主要是读取到/dev/fuse的数据转发给对应的fuse_xxx函数,比如fuse初始化挂载操作会转发请求到fuse_init函数
1
2
3
4
5
6
7//读取到的数据转发到对应的fuse_ops函数中
fuse_dispatch(xlator_t *xl, gf_async_t *async)
{
priv->fuse_ops[finh->opcode](xl, finh, fasync->msg, iobuf);
//priv->fuse_ops对应的是fuse_std_ops函数指针数组
priv->fuse_ops[finh->opcode](xl, finh, fasync->msg, iobuf);
}其中priv->fuse_ops中定义了fuse一系列操作,具体的定义如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63static fuse_handler_t *fuse_std_ops[FUSE_OP_HIGH] = {
[FUSE_LOOKUP] = fuse_lookup,
[FUSE_FORGET] = fuse_forget,
[FUSE_GETATTR] = fuse_getattr,
[FUSE_SETATTR] = fuse_setattr,
[FUSE_READLINK] = fuse_readlink,
[FUSE_SYMLINK] = fuse_symlink,
[FUSE_MKNOD] = fuse_mknod,
[FUSE_MKDIR] = fuse_mkdir,
[FUSE_UNLINK] = fuse_unlink,
[FUSE_RMDIR] = fuse_rmdir,
[FUSE_RENAME] = fuse_rename,
[FUSE_LINK] = fuse_link,
[FUSE_OPEN] = fuse_open,
[FUSE_READ] = fuse_readv,
[FUSE_WRITE] = fuse_write,
[FUSE_STATFS] = fuse_statfs,
[FUSE_RELEASE] = fuse_release,
[FUSE_FSYNC] = fuse_fsync,
[FUSE_SETXATTR] = fuse_setxattr,
[FUSE_GETXATTR] = fuse_getxattr,
[FUSE_LISTXATTR] = fuse_listxattr,
[FUSE_REMOVEXATTR] = fuse_removexattr,
[FUSE_FLUSH] = fuse_flush,
[FUSE_INIT] = fuse_init,
[FUSE_OPENDIR] = fuse_opendir,
[FUSE_READDIR] = fuse_readdir,
[FUSE_RELEASEDIR] = fuse_releasedir,
[FUSE_FSYNCDIR] = fuse_fsyncdir,
[FUSE_GETLK] = fuse_getlk,
[FUSE_SETLK] = fuse_setlk,
[FUSE_SETLKW] = fuse_setlk,
[FUSE_ACCESS] = fuse_access,
[FUSE_CREATE] = fuse_create,
[FUSE_INTERRUPT] = fuse_interrupt,
/* [FUSE_BMAP] */
[FUSE_DESTROY] = fuse_destroy,
/* [FUSE_IOCTL] */
/* [FUSE_POLL] */
/* [FUSE_NOTIFY_REPLY] */
#if FUSE_KERNEL_MINOR_VERSION >= 16
[FUSE_BATCH_FORGET] = fuse_batch_forget,
#endif
#if FUSE_KERNEL_MINOR_VERSION >= 19
#ifdef FALLOC_FL_KEEP_SIZE
[FUSE_FALLOCATE] = fuse_fallocate,
#endif /* FALLOC_FL_KEEP_SIZE */
#endif
#if FUSE_KERNEL_MINOR_VERSION >= 21
[FUSE_READDIRPLUS] = fuse_readdirp,
#endif
#if FUSE_KERNEL_MINOR_VERSION >= 24 && HAVE_SEEK_HOLE
[FUSE_LSEEK] = fuse_lseek,
#endif
#if FUSE_KERNEL_MINOR_VERSION >= 28
[FUSE_COPY_FILE_RANGE] = fuse_copy_file_range,
#endif
};
FUSE_FOP
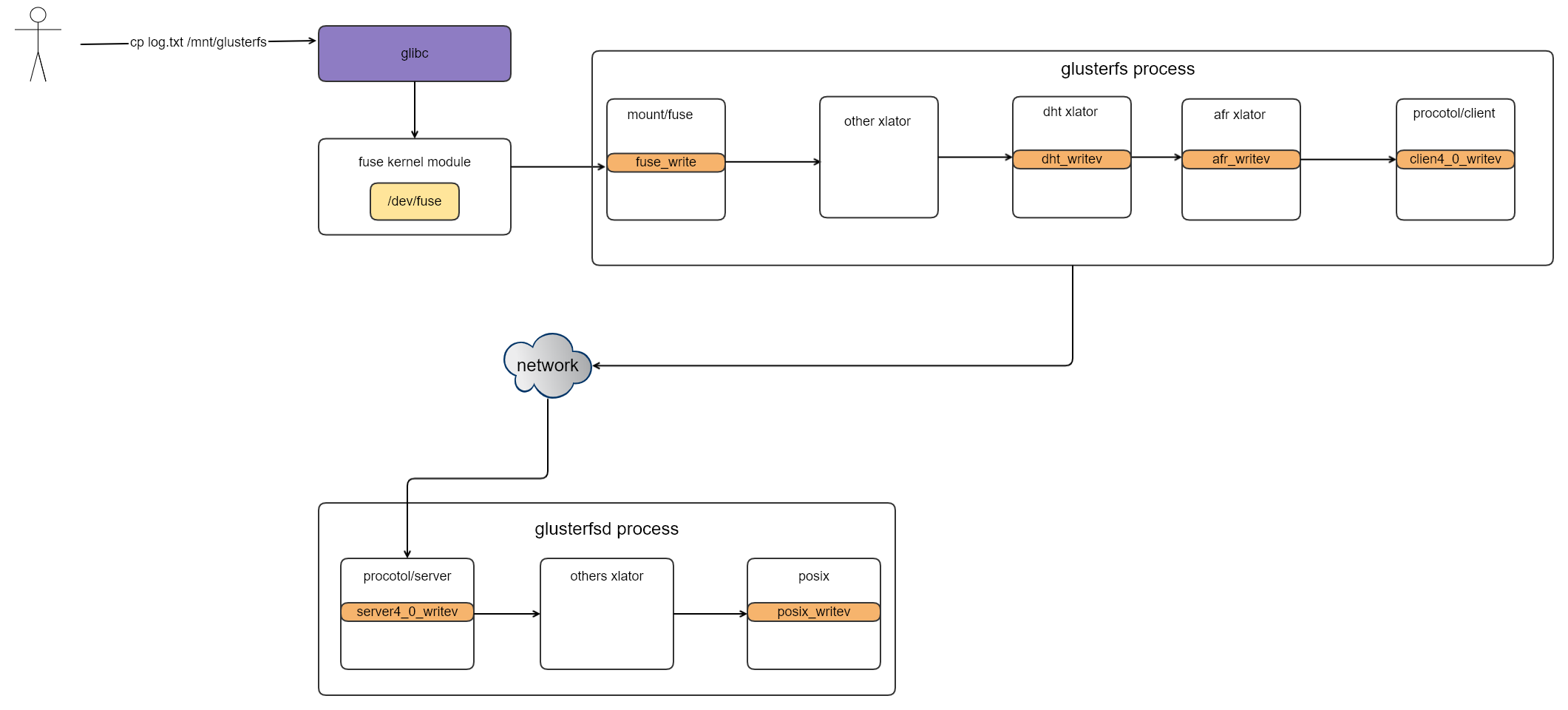
- FUSE_FOP用于转发当前操作到下一个xlator的fops函数,比如下一个xlator是cluster/dht,dht下一个xlator是cluster/afr,afr最后一个是protocol/client,procotol/client对应的是client4_0_writev函数,把数据通过网络push到对应某个glusterfsd进程。
1
2
3FUSE_FOP(state, fuse_writev_cbk, GF_FOP_WRITE, writev, state->fd,
&state->vector, 1, state->off, state->io_flags, iobref,
state->xdata);
- FUSE_FOP用于转发当前操作到下一个xlator的fops函数,比如下一个xlator是cluster/dht,dht下一个xlator是cluster/afr,afr最后一个是protocol/client,procotol/client对应的是client4_0_writev函数,把数据通过网络push到对应某个glusterfsd进程。
dht_writev
*dht_writev按照哈希卷的方式写入数据1
2
3
4
5
6
7
8
9
10
11
12//cluster/dht 的xlator中的dht_writev方法
int dht_writev(call_frame_t *frame, xlator_t *this, fd_t *fd, struct iovec *vector,
int count, off_t off, uint32_t flags, struct iobref *iobref,
dict_t *xdata)
{
//下一个xlator的调用申请
STACK_WIND_COOKIE(frame, dht_writev_cbk, subvol, subvol,
subvol->fops->writev, fd, local->rebalance.vector,
local->rebalance.count, local->rebalance.offset,
local->rebalance.flags, local->rebalance.iobref,
local->xattr_req);
}afr_writev
- 副本卷执行写入操作的方法
1
2
3
4int afr_writev(call_frame_t *frame, xlator_t *this,...)
{
afr_do_writev(frame, this);
}
- 副本卷执行写入操作的方法
client4_0_writev(protocol/client xlator)
- procotcol/client中的client4_0_writev是把数据push到某个节点的glusterfsd进程
1
2
3
4
5
6
7// procotol/client的xlator的writev方法
int32_t client4_0_writev(call_frame_t *frame, xlator_t *this, void *data)
{
ret = client_submit_request(this, &req, frame, conf->fops, GFS3_OP_WRITE, client4_0_writev_cbk, &cp,(xdrproc_t)xdr_gfx_write_req);
}
//(gdb) p conf->fops
$99 = (rpc_clnt_prog_t *) 0x7fffe9b79c20 <clnt4_0_fop_prog>
- procotcol/client中的client4_0_writev是把数据push到某个节点的glusterfsd进程
mount/fuse cp文件流程
设计基本思路
- mount/fuse 这个xlator的实现在xlator/src/mount模块中,该模块以fuse_开头的函数并么有在这个模块中显性中调用,都是通过fuse_std_ops初始化这个一些列函数,在具体执行时候根据这个数组的指针来隐形的调用。针对每个文件系统的操作(比如,ls,rm)都会转发到对应的fuse的函数处理,处理完毕后在走mount/fuse的下一个xlator,走对应xlator的一些列函数。
gdb 堆栈的信息
1 | //简化版本 |